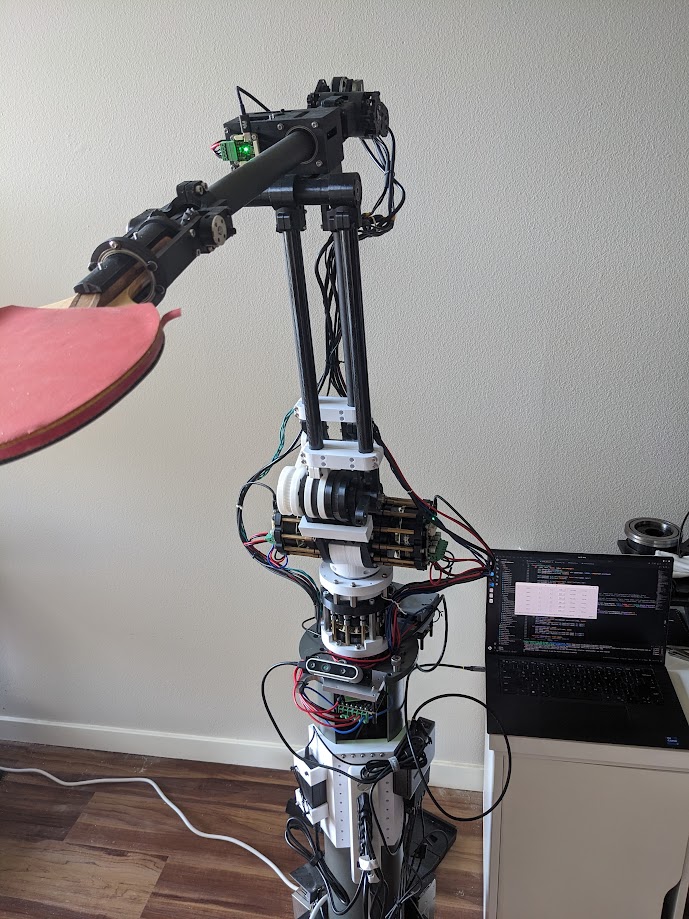
Robot is fully assembled and harnessing has been secured. This has been iterated upon many times, and will continue to be iterated upon.
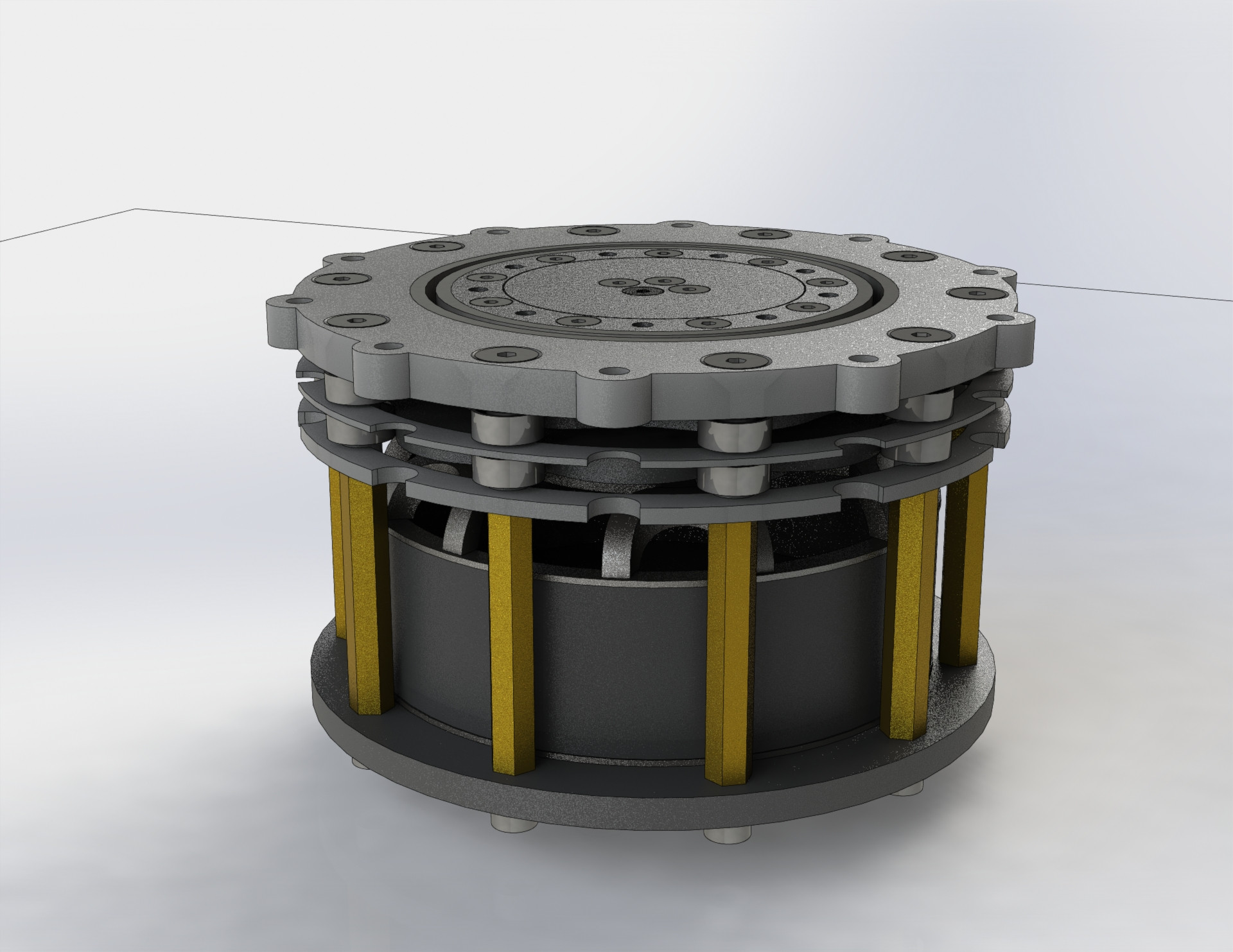
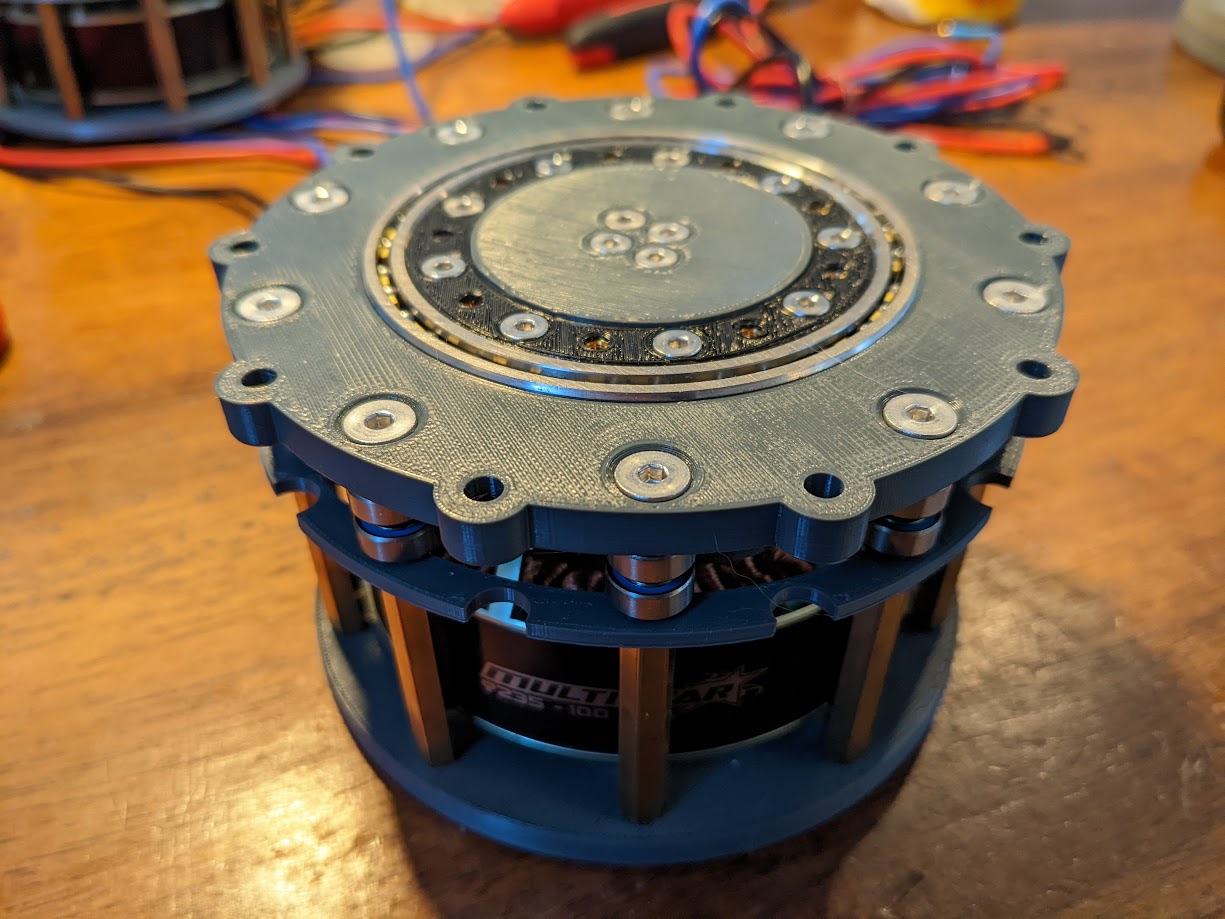
Cross section of the bottom three motors of the robot. The cycloidal gearbox for all three are visible here. After the initial link properties were plugged into the dynamical equations of motion, the gear ratio and belt reduction were adjusted to match what was needed. In addition, after the first prototype I found the cycloidal gear would tilt relative to its bearing, so I adjusted the design to incorporate double bearings.
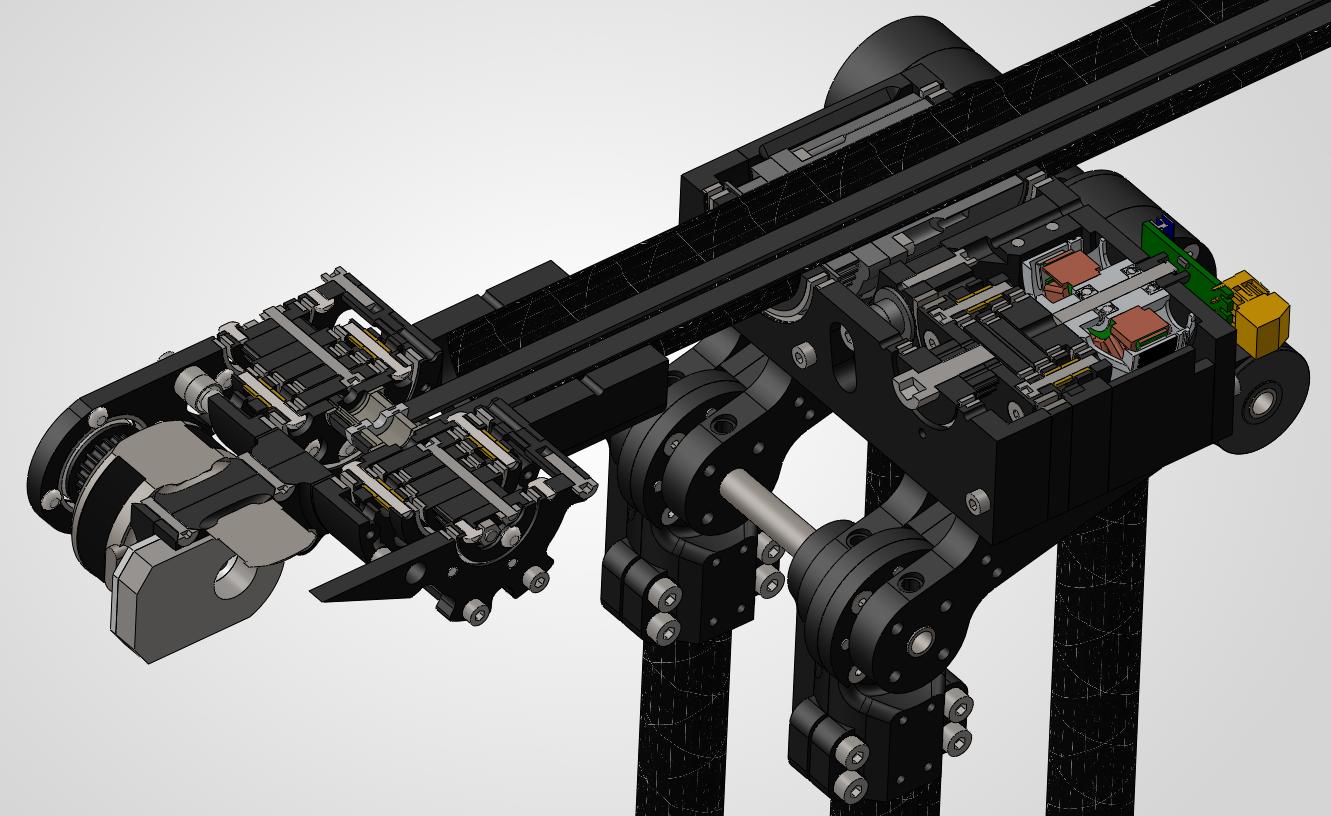
Cross section of the upper three motors of the robot. Cycloidal reduction is used here as well. The proximal motor turns a carbon fiber tube, while the next two motors drive long belts that are routed in the tube. In previous iterations, the rightmost gearbox was secured poorly with a thin fixture plate and a fracture was found. I redesigned the gearbox to strengthen the affected area and simplify the assembly process.
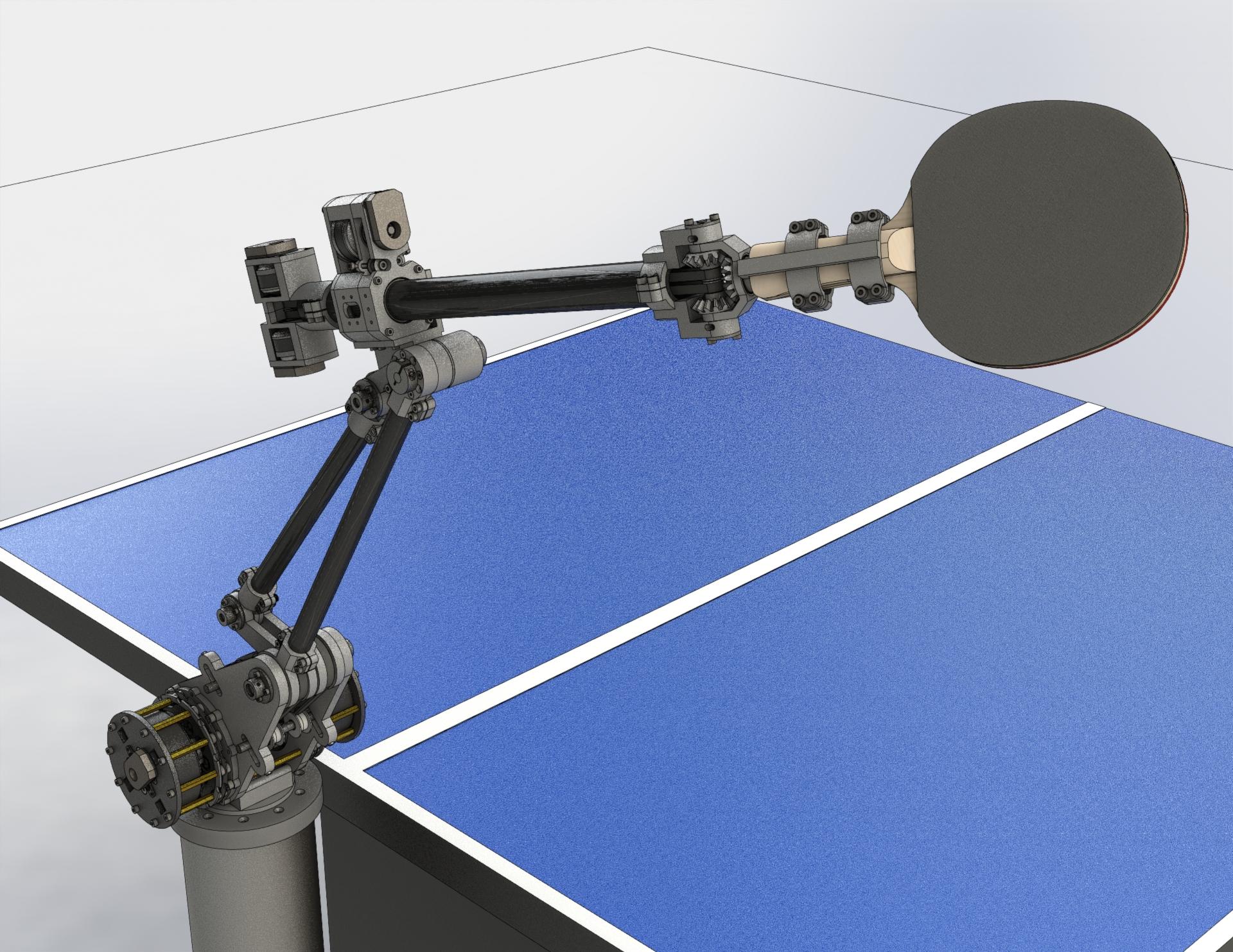
Different angle of robot.
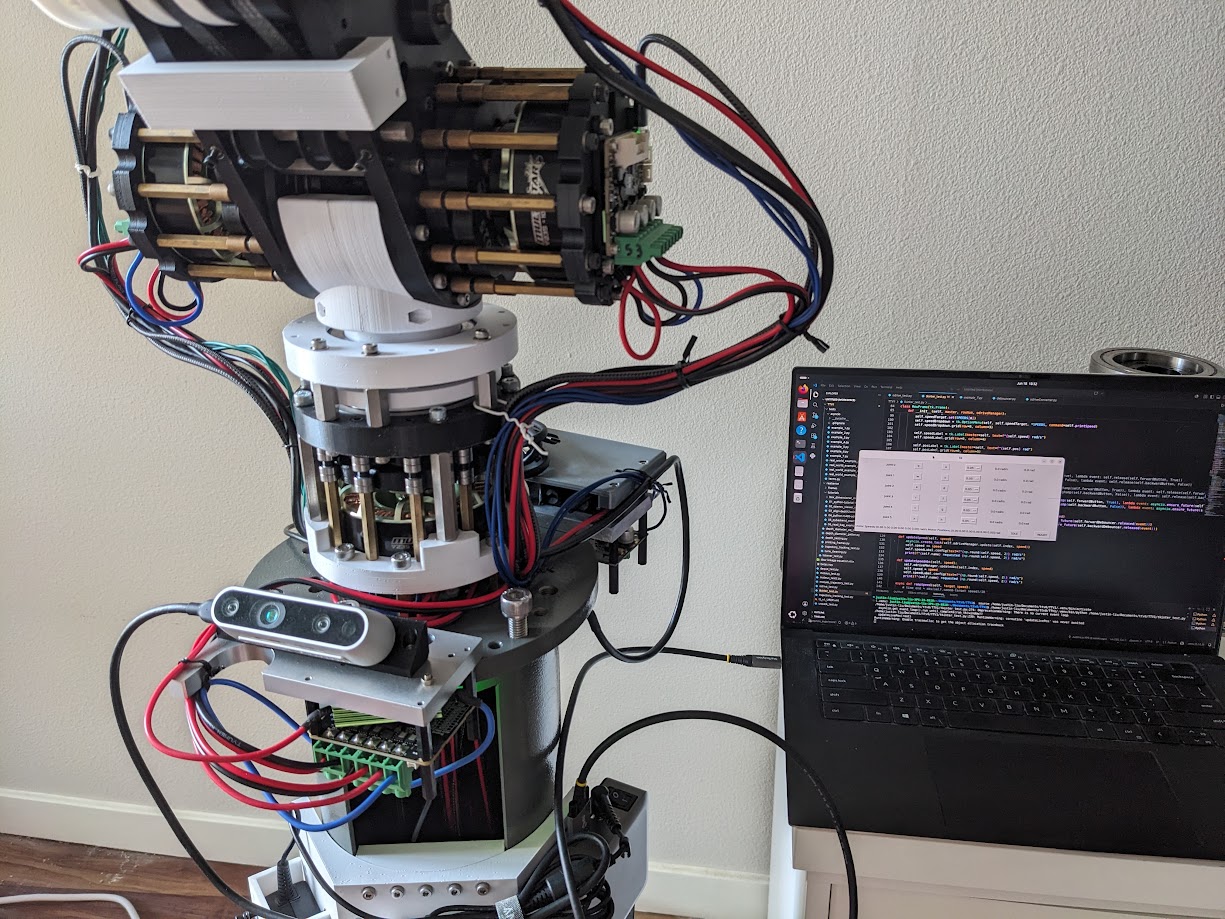
Close up of the bottom three motors assemblies and the haphazard harnessing. The GUI on the laptop is custom made with tkinter and asyncio.
Previous revision with single tube links and JT3 motor in vertical position. In real world testing, any joint 0 movement would send large vibrations up to the upper arm.

Rebuilt upper arm, now with dual tube links for stability. The upper arm can be separated from the robot easily (just take off the carbon fiber tubes) for retrofit. This gearbox is affixed to the thin fixture plates, and developed a fracture over the course of testing.
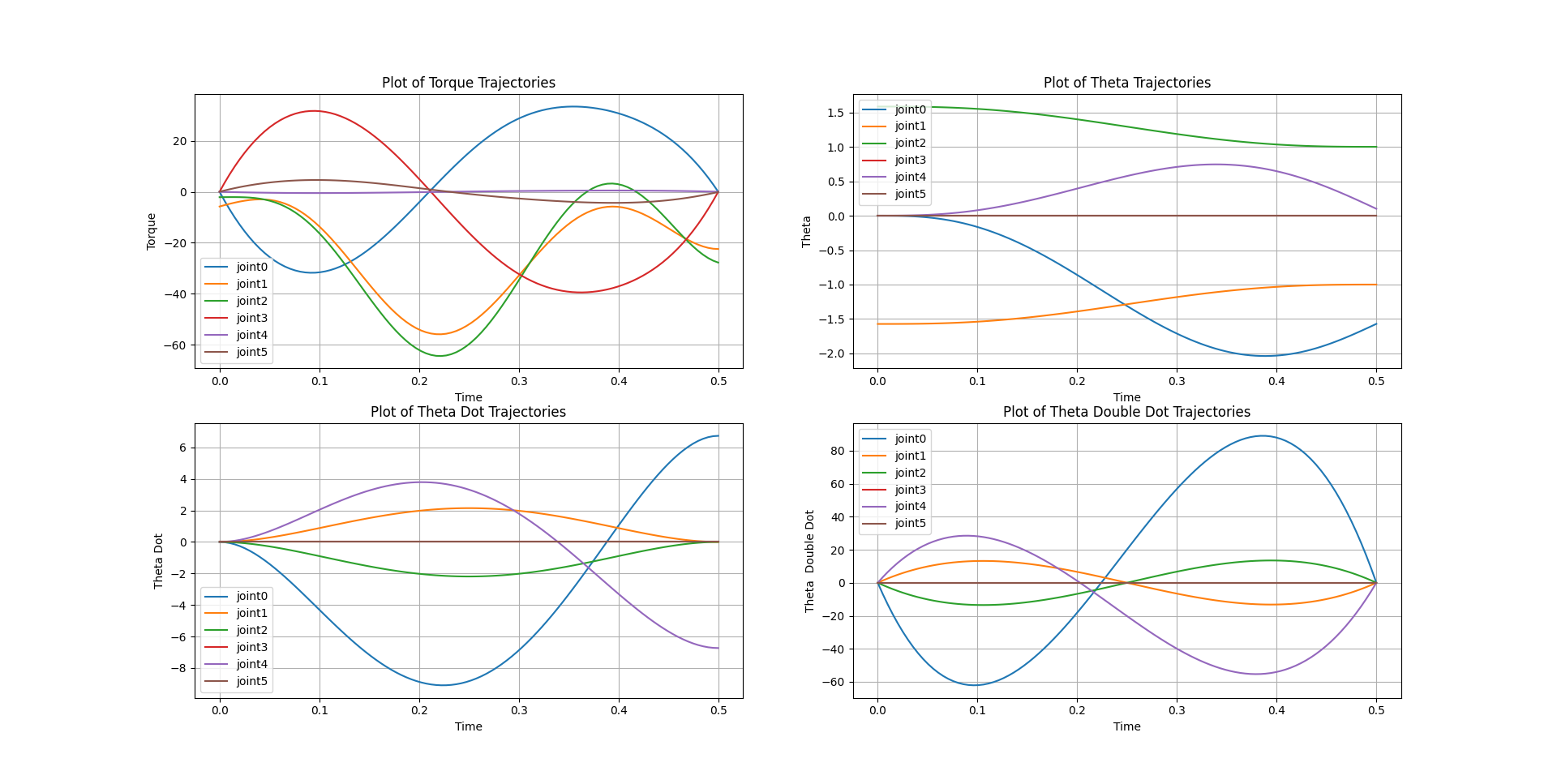
Torque, angle position, angular velocity, angular acceleration of all joints during a standard move in 0.5 seconds.