Arm extended with new custom roller cage under the NEMA 34.
The depth camera tracks the ball and generates a ball trajectory, which generates a feasible interception point and robot joint trajectories. In this case, the robot manages to make clean interceptions.
In this case, the robot interception misses.
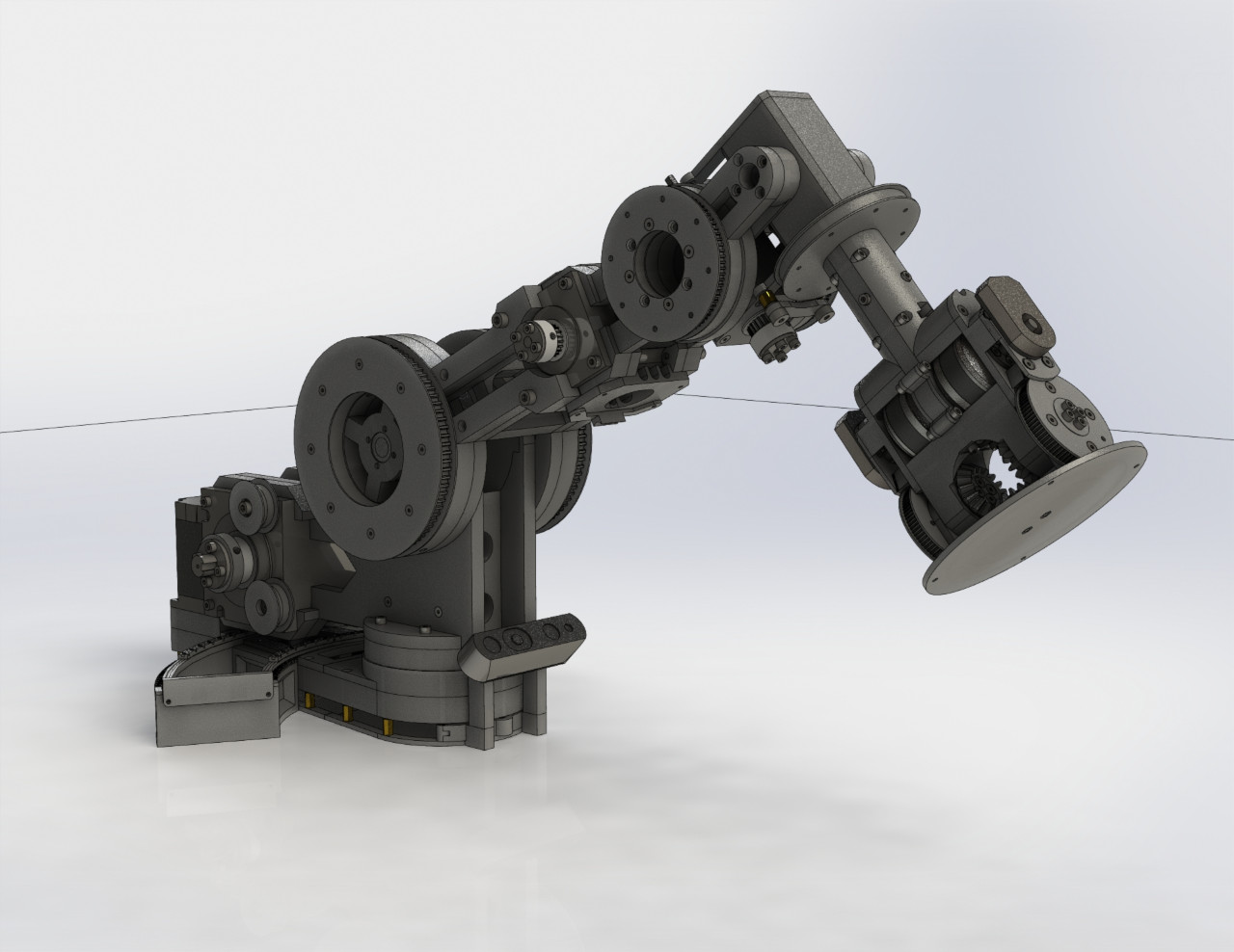
Render of most up-to-date model.
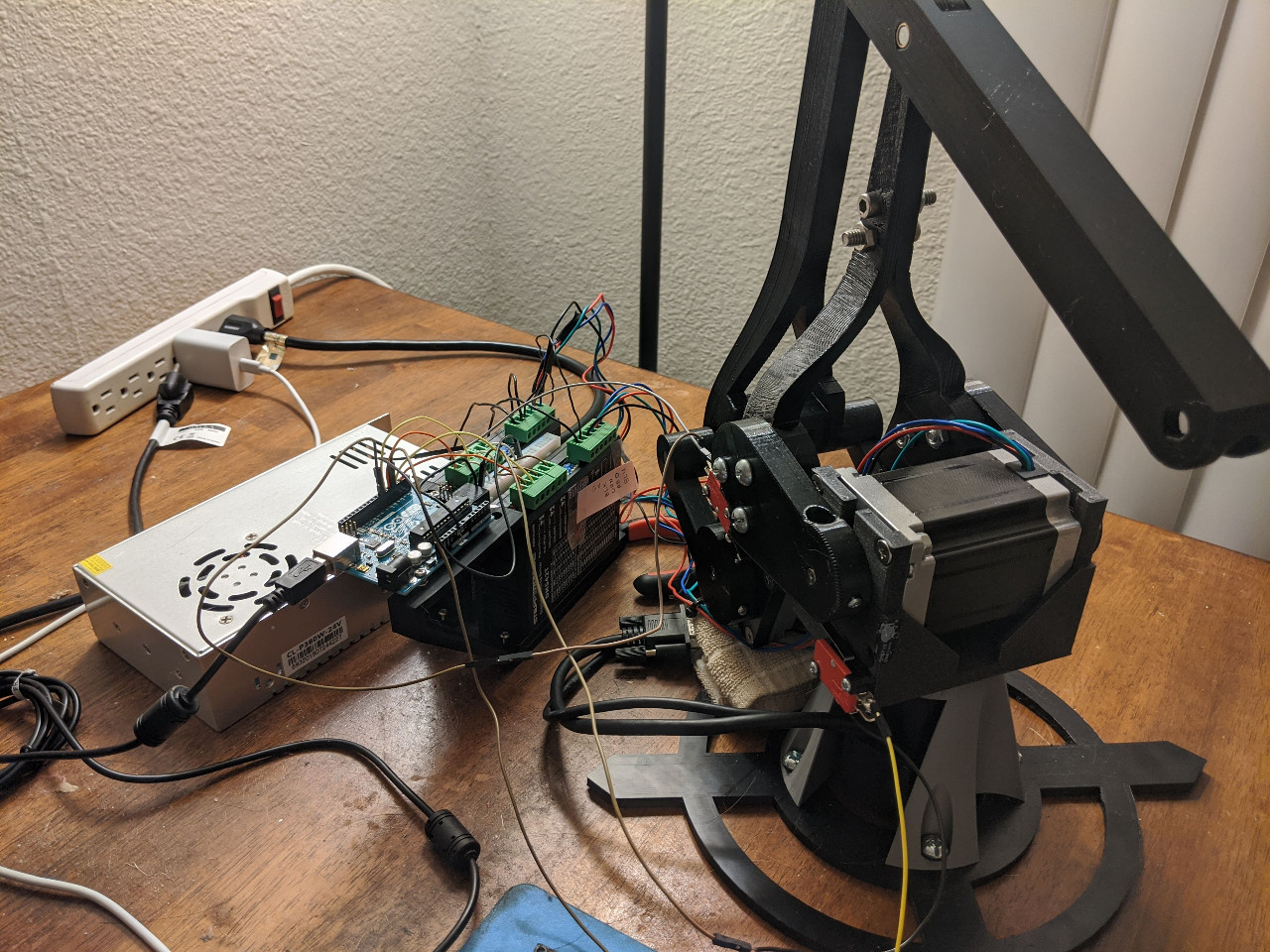
Very first prototype, a 3R arm that was clunky and slow.
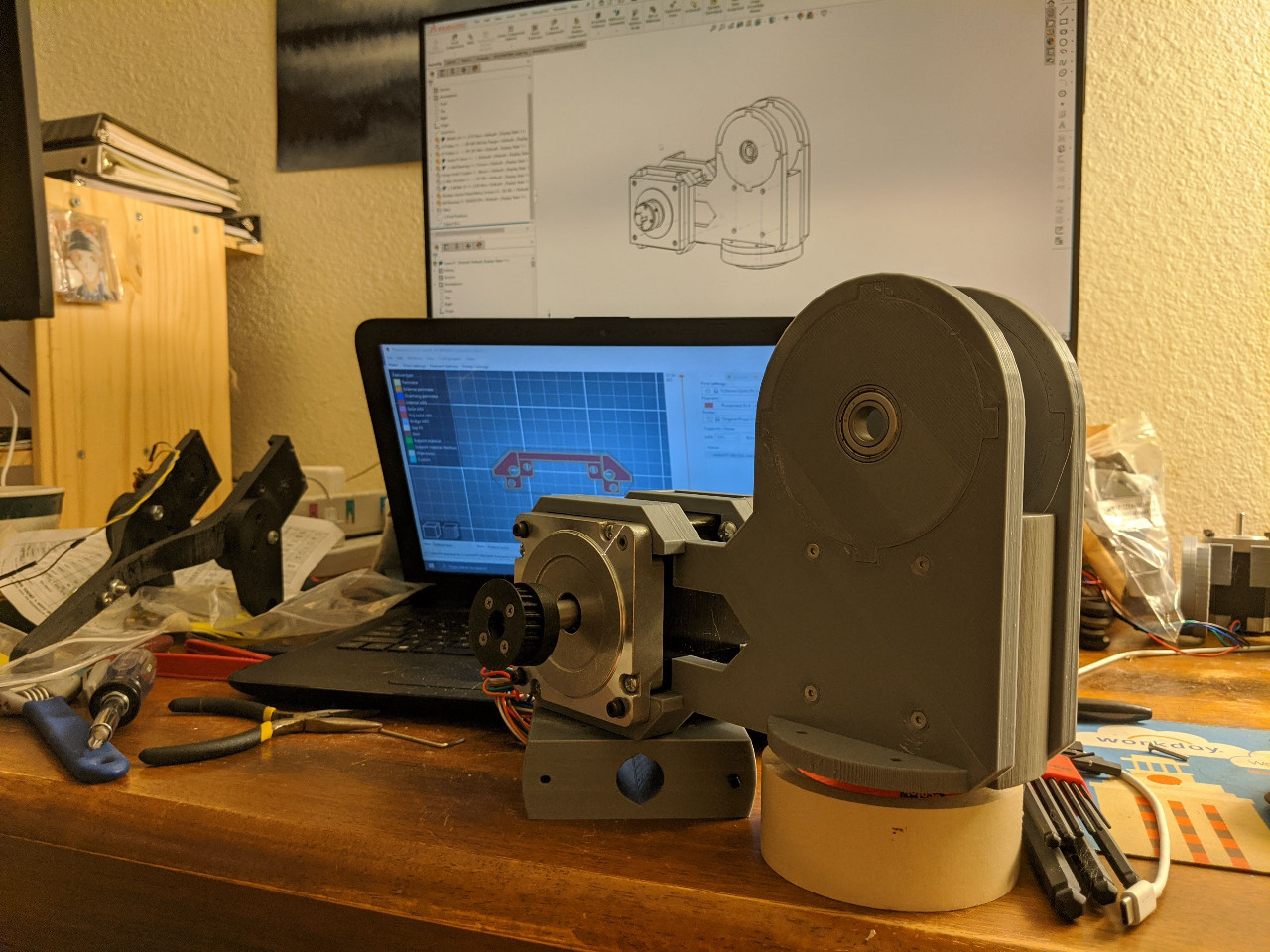
The lower base of the new design, with a NEMA 34 acting as a counterweight.
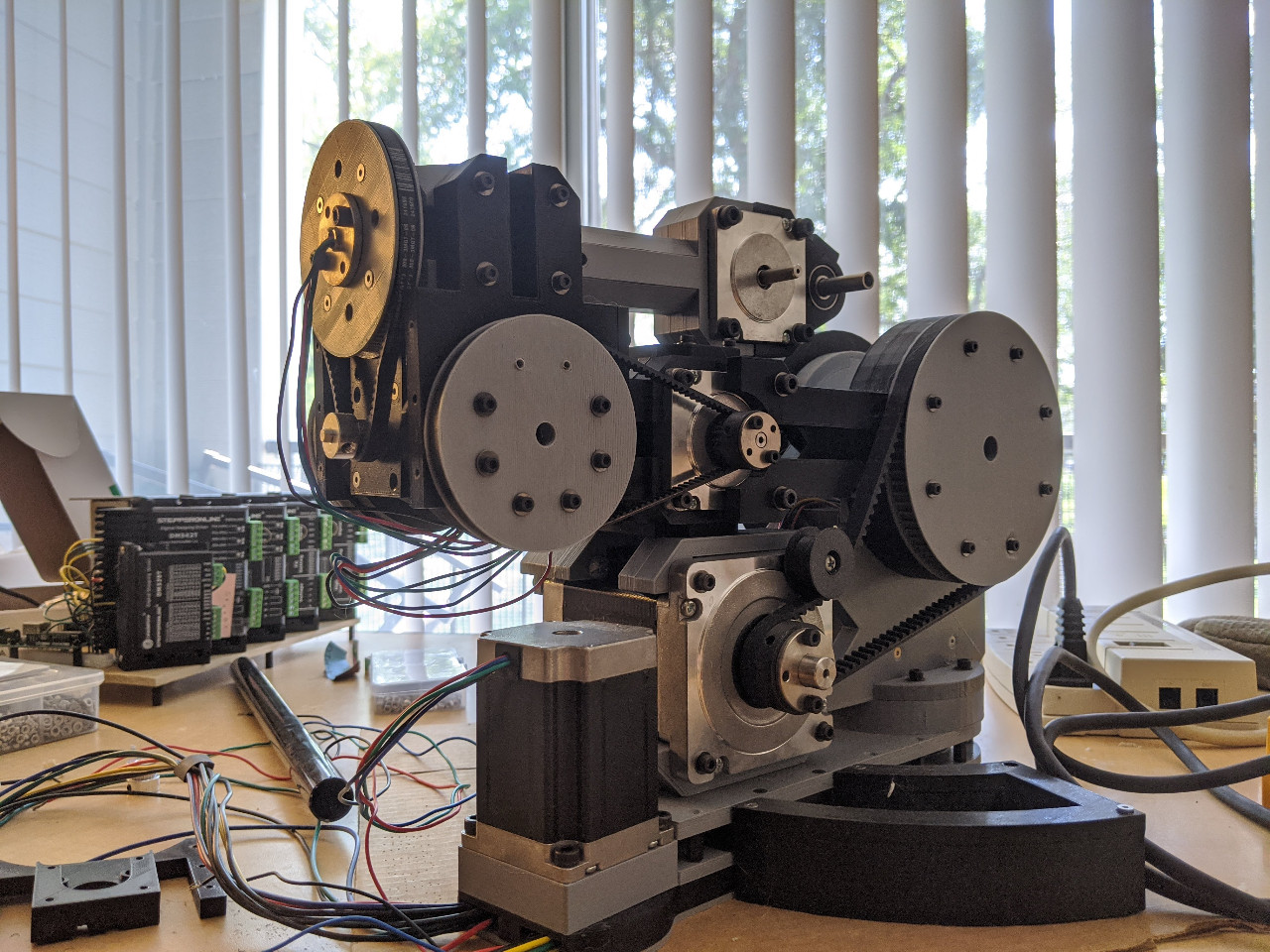
An almost assembled 5R robotic arm. I was having issues with belt tension forces pulling structural legs apart on link R2.
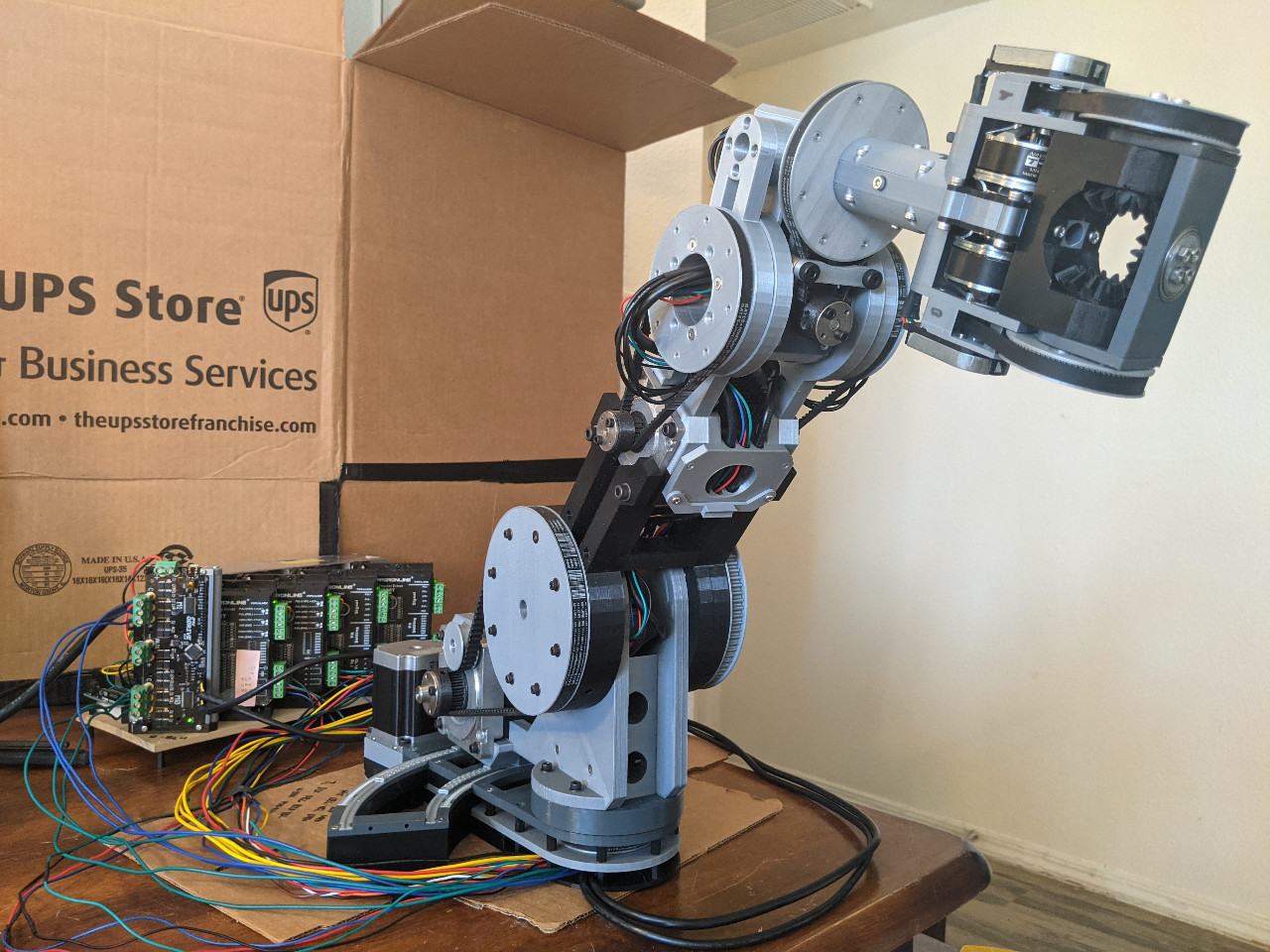
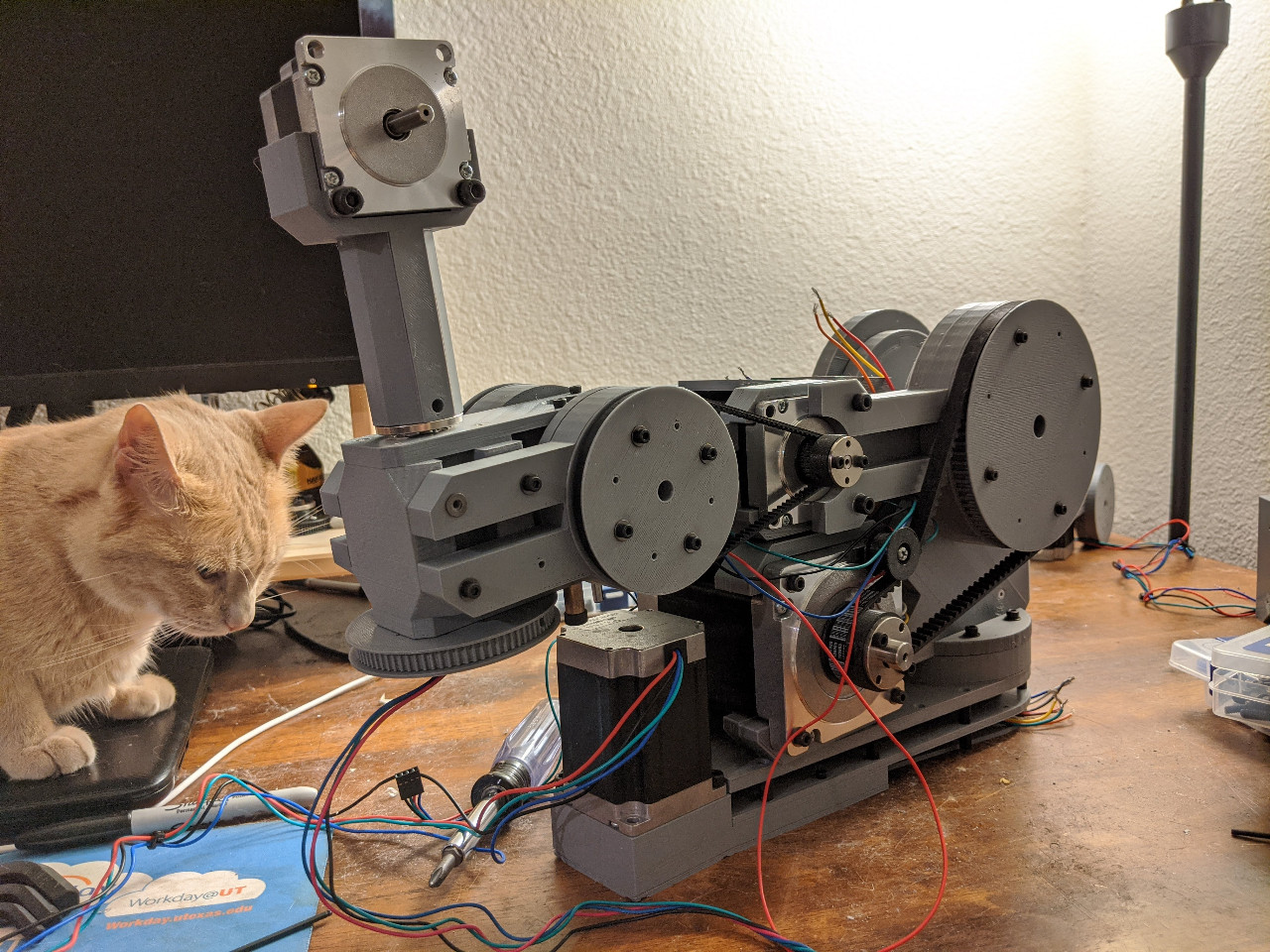
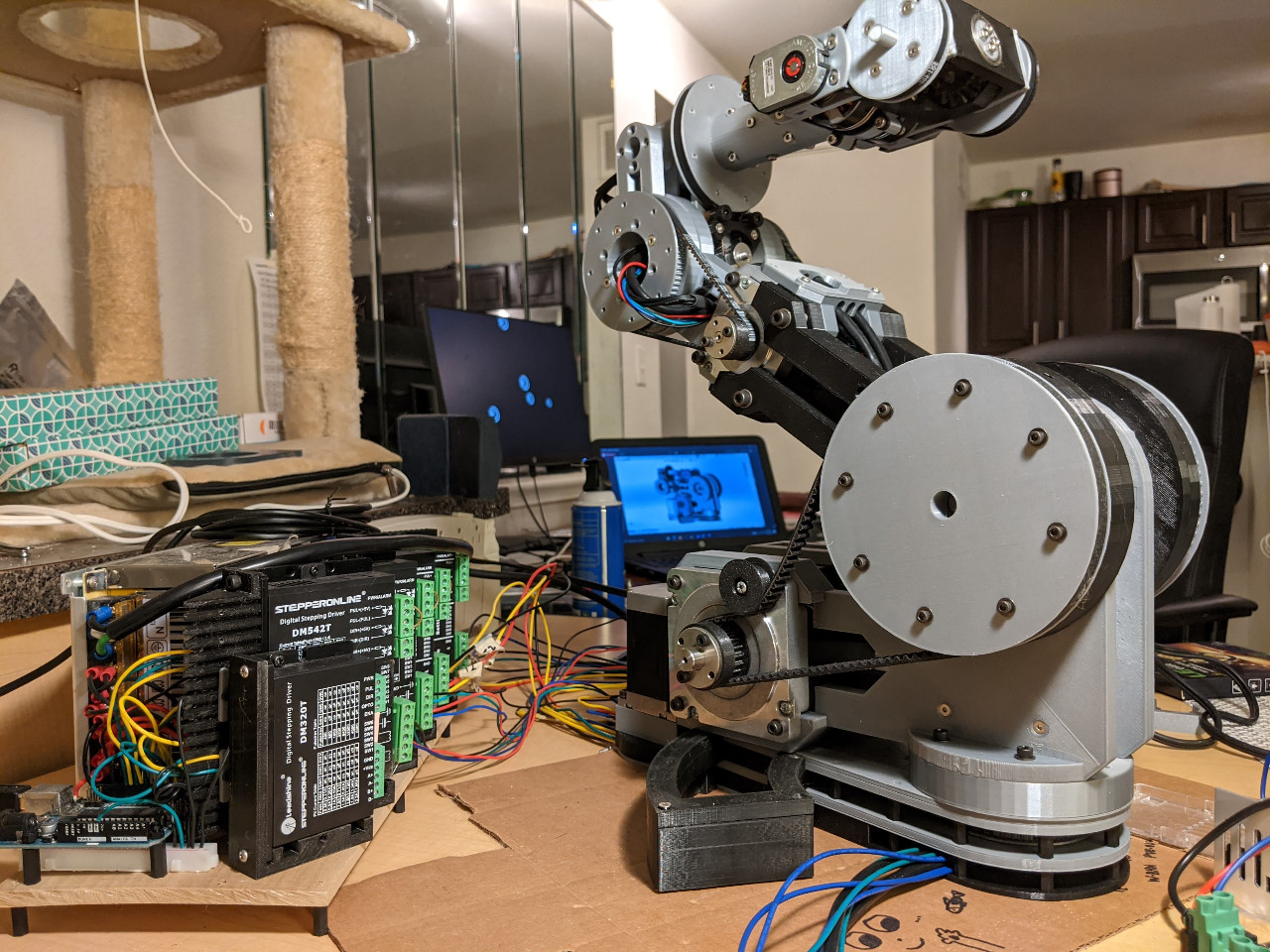
Fully assembled 5R robotic arm. Issues outstanding: belt tension forces issues despite adding structural support to link R2, wire routing issues, desire for full 6 axes.

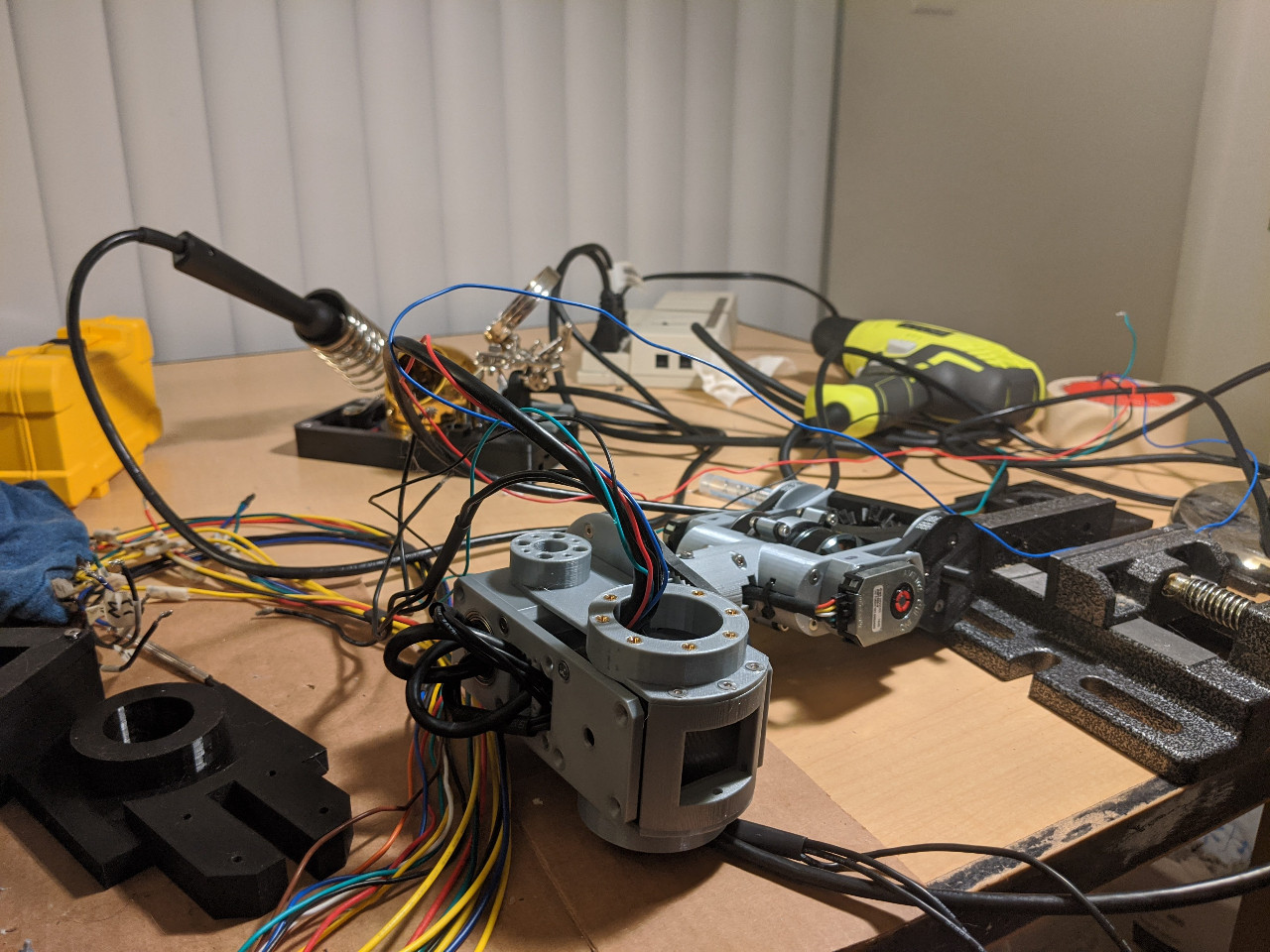
New differential motor assembly with BLDCs that would add an extra revolute joint. Both tilt and rotation of the end effector require coordination between these two motors. I used BLDCs because lighter motors are more useful at the most distal joints.
Installing the new differential assembly, along with a new link R2 which mostly eliminated the bowing. It also allowed for wires to go thru the joints.
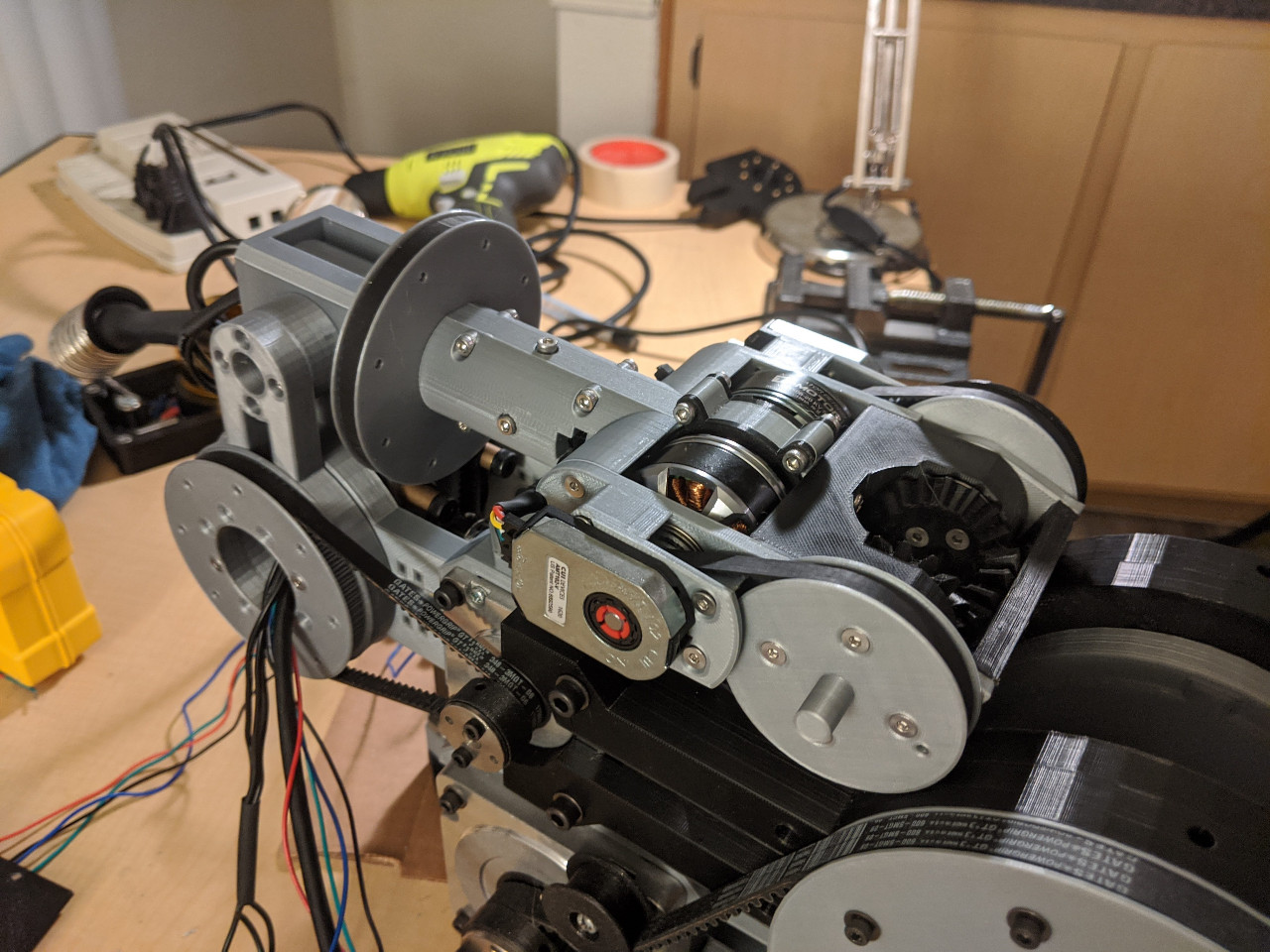
Finishing the installation of the new parts.
Finished installation of the differential assembly. However, rotation of the heavy NEMA 34 was jerky despite a ball bearing underneath. I would end up switching to a custom ball bearing ball cage and raceway which distributed the load evenly.